This is the extension week of the mechanical design week, where we make the mechanism we degined to work.
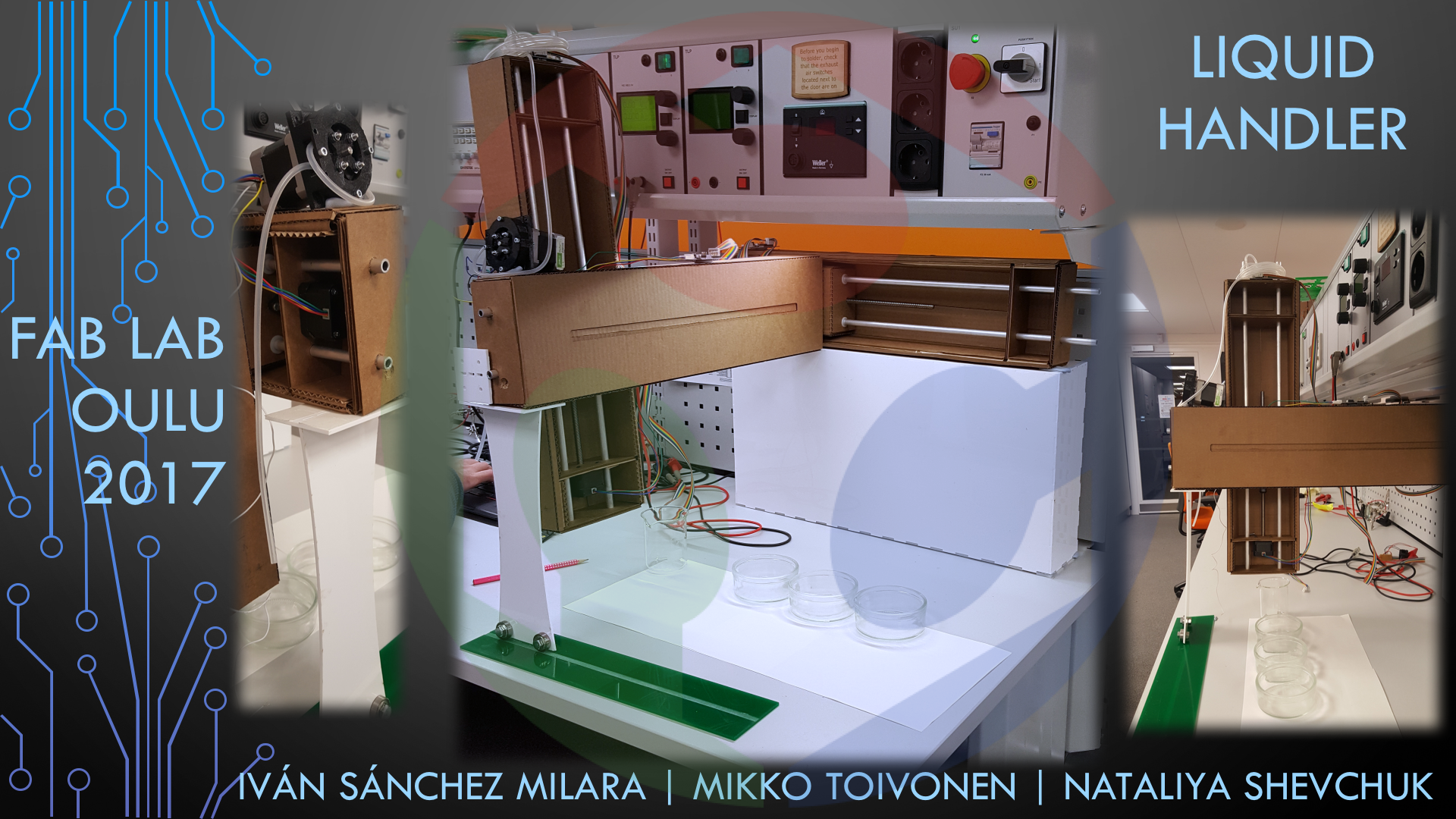
After finally finding the rights words to search with, and finding proper industrial liquid handlers online, we chose to change the design of the machine to match them. As the idea was to provide the labs with something similar to commercial capacity; and while a rotating disk would have provided some of that, it wouldnt be as compatitible with commercially available accessories.
I even started designing a pipettor head for the machine but we didnt have time to implement it, as to make a proper one would have taken too much time.

Idea of it was to connect 4 replaceable pipettor heads, things you can get a 1000 for 10 bucks, if the machine is commercially compatitible. The problem with the pump that we had was that the silicone hose was not the right size for the pump, also the pump components should have been anchored more properly to the shaft of the motor. Under load the shaft would slip and the pump mechanics would not move.
We used the gestalt for controlling the machine, and for this part of the assignment I did the adjustments to existing code, to make the machine move. But one of the weaknesses of the machine was that the cardboard it was made of was giving way too easily so it didnt move as fluently as one would hope.
the gestalt modules we used were provided by the lab and required the use of pygestalt to make them work. Of the pygestalt examples I used the fabnet_XYaxes.py as my starting point and added to it the support for the other two motors. This allowed me to move all 3 axes and the pump, to simulate the function of the machine.
To use the gestalt network we needed a USB to RS485 converter board, but the first one we had initially wasnt too useful. The cabling was problematic, so we found the board made by Bas, and made it. Since the board made by Bas was good for the assignment to continue, the board I designed was not necessary to produce.

The primary improvement for this board over the one Bas designed, is that it uses a terminal connector from the lab inventory, allowing for easier connection the external power needed by the mechanism.
The paperwork
- Assesment
- Have you, Explained your individual contribution to this project on your own website?
- Lecture Details
- Lecture Video
- Review Video
- The Files